
An embedded system is a special-purpose computer system designed to perform one or a few
dedicated functions1, sometimes with real-time computing constraints. It is usually embedded as
part of a complete device including hardware and mechanical parts. In contrast, a
general-purpose computer, such as a personal computer, can do many different tasks depending
on programming. Since the embedded system is dedicated to specific tasks, design engineers
can optimize it, reducing the size and cost of the product, or increasing the reliability and
performance. Some embedded systems are mass-produced, benefiting from economies of scale.
Physically, embedded systems range from portable devices such as digital watches and MP3
players, to large stationary installations like traffic lights, factory controllers, or the systems
controlling nuclear power plants. Complexity varies from low, with a single microcontroller chip, to
very high with multiple units, peripherals and networks mounted inside a large chassis or
enclosure.
In general, "embedded system" is not an exactly defined term, as many systems have some
element of programmability. For example, Handheld computers share some elements with
embedded systems - such as the operating systems and microprocessors which power them - but
are not truly embedded systems, because they allow different applications to be loaded and
peripherals to be connected.
Embedded systems span all aspects of modern life and examples of their use is
numerous.Telecommunications systems employ numerous embedded systems from telephone
switches for the network to mobile phones at the end-user. Computer networking uses dedicated
routers and network bridges to route data.Consumer electronics include personal digital
assistants (PDAs), mp3 players, mobile phones, videogame consoles, digital cameras, DVD
players, GPS receivers, and printers. More and more household appliances like the microwave
ovens and washing machines are including embedded systems to add advanced functionality.
Advanced HVAC systems use networked thermostats to more accurately and efficiently control
temperature that can change by time of day and season. Home automation uses wired- and
wireless-networking that can be used to control lights, climate, security, audio/visual, etc., all of
which use embedded devices for sensing and controlling.
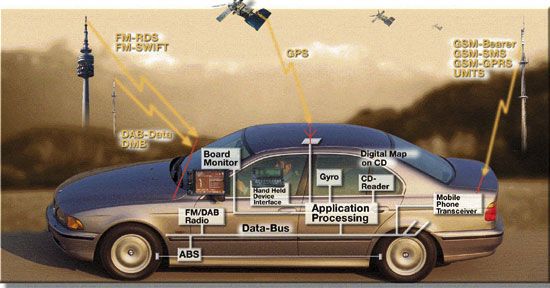
Transportation systems from flight to automobiles are also increasingly using embedded systems.
New airplanes contain advanced avionics such as inertial guidance systems and GPS receivers
that also have considerable safety requirements. Various electric motors — brushless DC motors,
induction motors and DC motors — are using electric/electronic motor controllers. Automobiles,
electric vehicles. and hybrid vehicles are increasingly using embedded systems to maximize
efficiency and reduce pollution. Other automotive safety systems such as anti-lock braking
system (ABS), Electronic Stability Control (ESC/ESP), and automatic four-wheel drive.Medical
equipment is continuing to advance with more embedded systems for vital signs monitoring,
electronic stethoscopes for amplifying sounds, and various medical imaging (PET, SPECT, CT,
MRI) for non-invasive internal inspections.
In the earliest years of computers in the 1940s, computers were sometimes dedicated to a single
task, but were too large to be considered "embedded". Over time however, the concept of
programmable controllers developed from a mix of computer technology, solid state devices, and
traditional electromechanical sequences.The first recognizably modern embedded system was the
Apollo Guidance Computer, developed by Charles Stark Draper at the MIT Instrumentation
Laboratory. At the project's inception, the Apollo guidance computer was considered the riskiest
item in the Apollo project. The use of the then new monolithic integrated circuits, to reduce the
size and weight, increased this risk.
The first mass-produced embedded system was the Autonetics D-17 guidance computer for the
Minuteman missile, released in 1961. It was built from transistor logic and had a hard disk for main
memory. When the Minuteman II went into production in 1966, the D-17 was replaced with a new
computer that was the first high-volume use of integrated circuits. This program alone reduced
prices on quad nand gate ICs from $1000/each to $3/each, permitting their use in commercial
products.
Since these early applications in the 1960s, embedded systems have come down in price. There
has also been an enormous rise in processing power and functionality. For example the first
microprocessor was the Intel 4004, which found its way into calculators and other small systems,
but required external memory and support chips.In 1978 National Engineering Manufacturers
Association released the standard for a programmable microcontroller. The definition was an
almost any computer-based controller. They included single board computers, numerical
controllers, and sequential controllers in order to perform event-based instructions.
By the mid-1980s, many of the previously external system components had been integrated into
the same chip as the processor, resulting in integrated circuits called microcontrollers, and
widespread use of embedded systems became feasible.As the cost of a microcontroller fell below
$1, it became feasible to replace expensive knob-based analog components such as
potentiometers and variable capacitors with digital electronics controlled by a small
microcontroller with up/down buttons or knobs. By the end of the 80s, embedded systems were
the norm rather than the exception for almost all electronics devices, a trend which has continued
since.
Embedded systems are designed to do some specific task, rather than be a general-purpose
computer for multiple tasks. Some also have real-time performance constraints that must be met,
for reason such as safety and usability; others may have low or no performance requirements,
allowing the system hardware to be simplified to reduce costs. Embedded systems are not always
separate devices. Most often they are physically built-in to the devices they control. The software
written for embedded systems is often called firmware, and is stored in read-only memory or Flash
memory chips rather than a disk drive. It often runs with limited computer hardware resources:
small or no keyboard, screen, and little memory.
Embedded systems range from no user interface at all - dedicated only to one task - to full user
interfaces similar to desktop operating systems in devices such as PDAs.Simple embedded
devices use buttons, LEDs, and small character- or digit-only displays, often with a simple menu
system.Soekris net4801, an embedded system targeted at network applications.1) Embedded
systems are designed to do some specific task, rather than be a general-purpose computer for
multiple tasks. Some also have real-time performance constraints that must be met, for reason
such as safety and usability; others may have low or no performance requirements, allowing the
system hardware to be simplified to reduce costs.
Embedded systems are not always separate devices. Most often they are physically built-in to the
devices they control. The software written for embedded systems is often called firmware, and is
stored in read-only memory or Flash memory chips rather than a disk drive. It often runs with
limited computer hardware resources: small or no keyboard, screen, and little memory.

Embedded processors can be broken into two distinct categories: microprocessors (µP) and
microcontrollers (µC). Microcontrollers have built-in peripherals on the chip, reducing size of the
system.There are many different CPU architectures used in embedded designs such as ARM,
MIPS, Coldfire/68k, PowerPC, x86, PIC, 8051, Atmel AVR, Renesas H8, SH, V850, FR-V, M32R, Z80,
Z8, etc. This in contrast to the desktop computer market, which is currently limited to just a few
competing architectures.PC/104 and PC/104+ are a typical base for small, low-volume embedded
and ruggedized system design. These often use DOS, Linux, NetBSD, or an embedded real-time
operating system such as MicroC/OS-II, QNX or VxWorks.
A common configuration for very-high-volume embedded systems is the system on a chip (SoC),
an application-specific integrated circuit (ASIC), for which the CPU core was purchased and added
as part of the chip design. A related scheme is to use a field-programmable gate array (FPGA),
and program it with all the logic, including the CPU.Embedded Systems talk with the outside world
via peripherals, such as: Serial Communication Interfaces (SCI): RS-232, RS-422, RS-485 etc
Synchronous Serial Communication Interface: I2C, JTAG, SPI, SSC and ESSI. Universal Serial Bus
(USB), Networks: Ethernet, Controller Area Network, LonWorks, etc, Timers: PLL(s),
Capture/Compare and Time Processing Units, Discrete IO: aka General Purpose Input/Output
(GPIO), Analog to Digital/Digital to Analog (ADC/DAC).
As for other software, embedded system designers use compilers, assemblers, and debuggers to
develop embedded system software. However, they may also use some more specific tools: In
circuit debuggers or emulators (see next section). Utilities to add a checksum or CRC to a
program, so the embedded system can check if the program is valid. For systems using digital
signal processing, developers may use a math workbench such as MATLAB, Simulink, MathCad,
or Mathematica to simulate the mathematics. They might also use libraries for both the host and
target which eliminates developing DSP routines as done in DSPnano RTOS and Unison Operating
System. Custom compilers and linkers may be used to improve optimisation for the particular
hardware. An embedded system may have its own special language or design tool, or add
enhancements to an existing language such as Forth or Basic. Another alternative is to add a
Real-time operating system or Embedded operating system, which may have DSP capabilities like
DSPnano RTOS.
Embedded Debugging may be performed at different levels, depending on the facilities available.
From simplest to most sophisticated they can be roughly grouped into the following
areas:Interactive resident debugging, using the simple shell provided by the embedded operating
system (e.g. Forth and Basic) , External debugging using logging or serial port output to trace
operation using either a monitor in flash or using a debug server like the Remedy Debugger which
even works for heterogeneous multicore systems. An in-circuit debugger (ICD), a hardware
device that connects to the microprocessor via a JTAG or NEXUS interface. This allows the
operation of the microprocessor to be controlled externally, but is typically restricted to specific
debugging capabilities in the processor.
An in-circuit emulator replaces the microprocessor with a simulated equivalent, providing full
control over all aspects of the microprocessor. A complete emulator provides a simulation of all
aspects of the hardware, allowing all of it to be controlled and modified, and allowing debugging
on a normal PC. Unless restricted to external debugging, the programmer can typically load and
run software through the tools, view the code running in the processor, and start or stop its
operation. The view of the code may be as assembly code or source-code.
Embedded systems often reside in machines that are expected to run continuously for years
without errors, and in some cases recover by themselves if an error occurs. Therefore the
software is usually developed and tested more carefully than that for personal computers, and
unreliable mechanical moving parts such as disk drives, switches or buttons are
avoided.Recovery from errors may be achieved with techniques such as a watchdog timer that
resets the computer unless the software periodically notifies the watchdog.
Specific reliability issues may include: The system cannot safely be shut down for repair, or it is
too inaccessible to repair. Solutions may involve subsystems with redundant spares that can be
switched over to, or software "limp modes" that provide partial function. Examples include space
systems, undersea cables, navigational beacons, bore-hole systems, and automobiles.
The system must be kept running for safety reasons. "Limp modes" are less tolerable. Often
backups are selected by an operator. Examples include aircraft navigation, reactor control
systems, safety-critical chemical factory controls, train signals, engines on single-engine aircraft.
The system will lose large amounts of money when shut down: Telephone switches, factory
controls, bridge and elevator controls, funds transfer and market making, automated sales and
service.
A real-time operating system (RTOS) is a multitasking operating system intended for real-time
applications. Such applications include embedded systems (programmable thermostats,
household appliance controllers, mobile telephones), industrial robots, spacecraft, industrial
control (see SCADA), and scientific research equipment.
An RTOS facilitates the creation of a real-time system, but does not guarantee the final result will
be real-time; this requires correct development of the software. An RTOS does not necessarily
have high throughput; rather, an RTOS provides facilities which, if used properly, guarantee
deadlines can be met generally (soft real-time) or deterministically (hard real-time). An RTOS will
typically use specialized scheduling algorithms in order to provide the real-time developer with the
tools necessary to produce deterministic behavior in the final system. An RTOS is valued more for
how quickly and/or predictably it can respond to a particular event than for the given amount of
work it can perform over time. Key factors in an RTOS are therefore a minimal interrupt latency
and a minimal thread switching latency.An early example of a large-scale real-time operating
system was the so-called "control program" developed by American Airlines and IBM for the
Sabre Airline Reservations System.
Time-sharing designs switch tasks more often than is strictly needed, but give smoother, more
deterministic multitasking, giving the illusion that a process or user has sole use of a machine.
Early CPU designs needed many cycles to switch tasks, during which the CPU could do nothing
useful. So early OSes tried to minimize wasting CPU time by maximally avoiding unnecessary
task-switches.More recent CPUs take far less time to switch from one task to another; the extreme
case is barrel processors that switch from one task to the next in zero cycles. Newer RTOSes
almost invariably implement time-sharing scheduling with priority driven pre-emptive scheduling.

In typical designs, a task has three states: 1) running, 2) ready, 3) blocked. Most tasks are
blocked, most of the time. Only one task per CPU is running. In simpler systems, the ready list is
usually short, two or three tasks at most.The real key is designing the scheduler. Usually the data
structure of the ready list in the scheduler is designed to minimize the worst-case length of time
spent in the scheduler's critical section, during which preemption is inhibited, and, in some cases,
all interrupts are disabled. But, the choice of data structure depends also on the maximum
number of tasks that can be on the ready list.
If there are never more than a few tasks on the ready list, then a simple unsorted bidirectional
linked list of ready tasks is likely optimal. If the ready list usually contains only a few tasks but
occasionally contains more, then the list should be sorted by priority, so that finding the highest
priority task to run does not require iterating through the entire list. Inserting a task then requires
walking the ready list until reaching either the end of the list, or a task of lower priority than that of
the task being inserted. Care must be taken not to inhibit preemption during this entire search; the
otherwise-long critical section should probably be divided into small pieces, so that if, during the
insertion of a low priority task, an interrupt occurs that makes a high priority task ready, that high
priority task can be inserted and run immediately (before the low priority task is inserted).
The critical response time, sometimes called the flyback time, is the time it takes to queue a new
ready task and restore the state of the highest priority task. In a well-designed RTOS, readying a
new task will take 3-20 instructions per ready queue entry, and restoration of the highest-priority
ready task will take 5-30 instructions. On a 20MHz 68000 processor, task switch times run about
20 microseconds with two tasks ready. 100 MHz ARM CPUs switch in a few microseconds.In more
advanced real-time systems, real-time tasks share computing resources with many non-real-time
tasks, and the ready list can be arbitrarily long. In such systems, a scheduler ready list
implemented as a linked list would be inadequate.
Multitasking systems must manage sharing data and hardware resources among multiple tasks. It
is usually "unsafe" for two tasks to access the same specific data or hardware resource
simultaneously. ("Unsafe" means the results are inconsistent or unpredictable, particularly when
one task is in the midst of changing a data collection. The view by another task is best done either
before any change begins, or after changes are completely finished.) There are three common
approaches to resolve this problem:
General-purpose operating systems usually do not allow user programs to mask (disable)
interrupts, because the user program could control the CPU for as long as it wished. Modern CPUs
make the interrupt disable control bit (or instruction) inaccessible in user mode to allow operating
systems to prevent user tasks from doing this. Many embedded systems and RTOSs, however,
allow the application itself to run in kernel mode for greater system call efficiency and also to
permit the application to have greater control of the operating environment without requiring OS
intervention.
On single-processor systems, if the application runs in kernel mode and can mask interrupts,
often that is the best (lowest overhead) solution to preventing simultaneous access to a shared
resource. While interrupts are masked, the current task has exclusive use of the CPU; no other
task or interrupt can take control, so the critical section is effectively protected. When the task
exits its critical section, it must unmask interrupts; pending interrupts, if any, will then execute.
Temporarily masking interrupts should only be done when the longest path through the critical
section is shorter than the desired maximum interrupt latency, or else this method will increase
the system's maximum interrupt latency. Typically this method of protection is used only when the
critical section is just a few source code lines long and contains no loops. This method is ideal for
protecting hardware bitmapped registers when the bits are controlled by different tasks.
When the critical section is longer than a few source code lines or involves lengthy looping, an
embedded/real-time programmer must resort to using mechanisms identical or similar to those
available on general-purpose operating systems, such as semaphores and OS-supervised
interprocess messaging. Such mechanisms involve system calls, and usually invoke the OS's
dispatcher code on exit, so they can take many hundreds of CGeneral-purpose operating systems
usually do not allow user programs to mask (disable) interrupts, because the user program could
control the CPU for as long as it wished. Modern CPUs make the interrupt disable control bit (or
instruction) inaccessible in user mode to allow operating systems to prevent user tasks from
doing this. Many embedded systems and RTOSs, however, allow the application itself to run in
kernel mode for greater system call efficiency and also to permit the application to have greater
control of the operating environment without requiring OS intervention.
On single-processor systems, if the application runs in kernel mode and can mask interrupts,
often that is the best (lowest overhead) solution to preventing simultaneous access to a shared
resource. While interrupts are masked, the current task has exclusive use of the CPU; no other
task or interrupt can take control, so the critical section is effectively protected. When the task
exits its critical section, it must unmask interrupts; pending interrupts, if any, will then execute.
Temporarily masking interrupts should only be done when the longest path through the critical
section is shorter than the desired maximum interrupt latency, or else this method will increase
the system's maximum interrupt latency. Typically this method of protection is used only when the
critical section is just a few source code lines long and contains no loops. This method is ideal for
protecting hardware bitmapped registers when the bits are controlled by different tasks.
When the critical section is longer than a few source code lines or involves lengthy looping, an
embedded/real-time programmer must resort to using mechanisms identical or similar to those
available on general-purpose operating systems, such as semaphores and OS-supervised
interprocess messaging. Such mechanisms involve system calls, and usually invoke the OS's
dispatcher code on exit, so they can take many hundreds of CPU instructions to execute, while
masking interrupts may take as few as three instructions on some processors. But for longer
critical sections, there may be no choice; interrupts cannot be masked for long periods without
increasing the system's interrupt latency.PU instructions to execute, while masking interrupts may
take as few as three instructions on some processors. But for longer critical sections, there may
be no choice; interrupts cannot be masked for long periods without increasing the system's
interrupt latency.
